Real-time Vision-based Navigation for a Robot in an Indoor Environment
Sagar Manglani
[Stanford University]
-
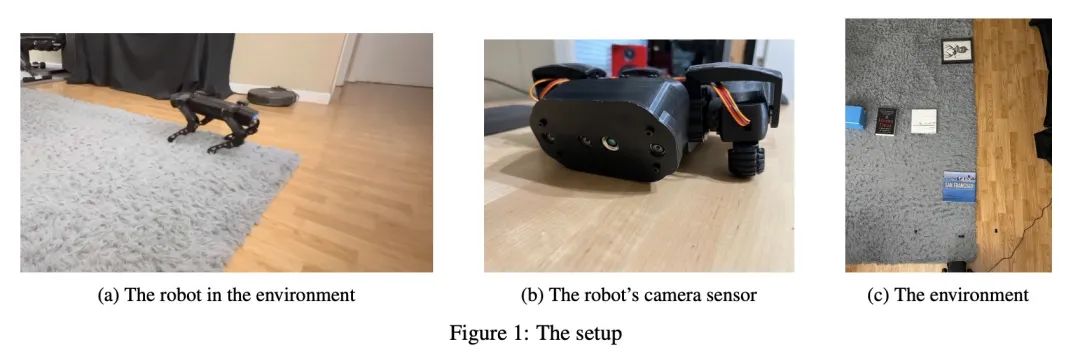
动机:随着家庭环境中自主导航机器人的需求日益增长,如何使机器人能够有效地避开障碍物并快速到达目的地成为了一个重要的研究问题。本文的目标是开发一个基于视觉的障碍物避让导航系统,使机器人能够在家庭环境中自主导航。 -
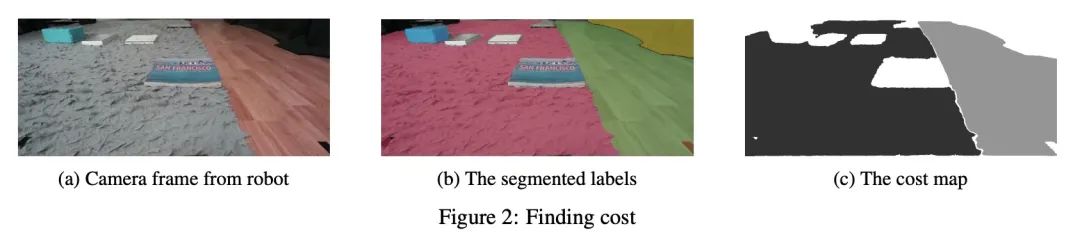
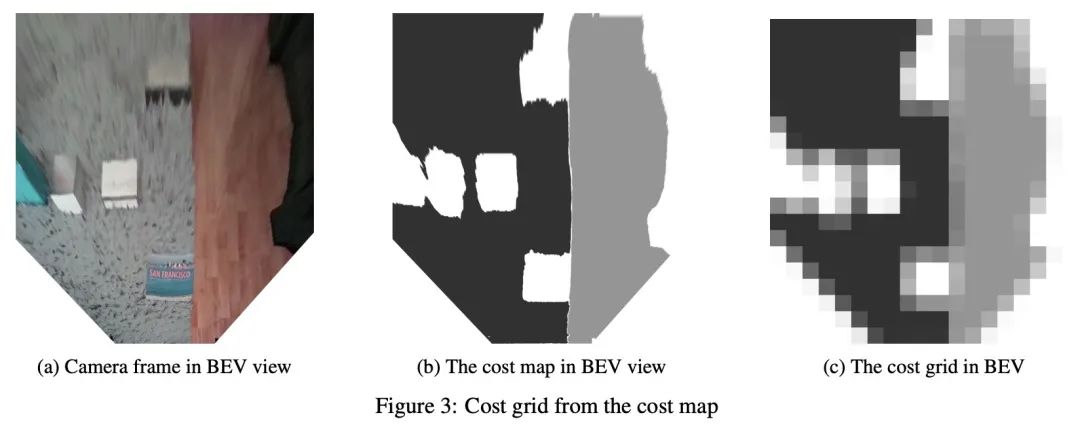
方法:首先对颜色图像进行预处理,使用一种名为Segment-Anything的语义分割网络来获取准确的地面和障碍物分割结果。然后,根据障碍物的特性和机器人的遍历能力,为分割的障碍物分配成本。最后,使用A*算法确定最低成本的最优路径,同时考虑避开障碍物和有效地导航到目的地。 -
优势:能实时进行视觉导航,并且能有效地避开障碍物。此外,通过使用语义分割网络和A*算法,系统能生成准确的导航路径。
提出一种基于视觉的障碍物避让导航系统,该系统能够实时进行导航,并能有效地避开障碍物,为家庭环境中的自主导航机器人提供了一种有效的解决方案。
https://arxiv.org/abs/2307.00666
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
这是一个专注于人工智能产品的导航站。
