Statler: State-Maintaining Language Models for Embodied Reasoning
T Yoneda, J Fang, P Li, H Zhang, T Jiang, S Lin, B Picker, D Yunis, H Mei, M R. Walter
[Toyota Technological Institute at Chicago & Fudan University]
Statler: 面向具身推理的状态维持语言模型
-
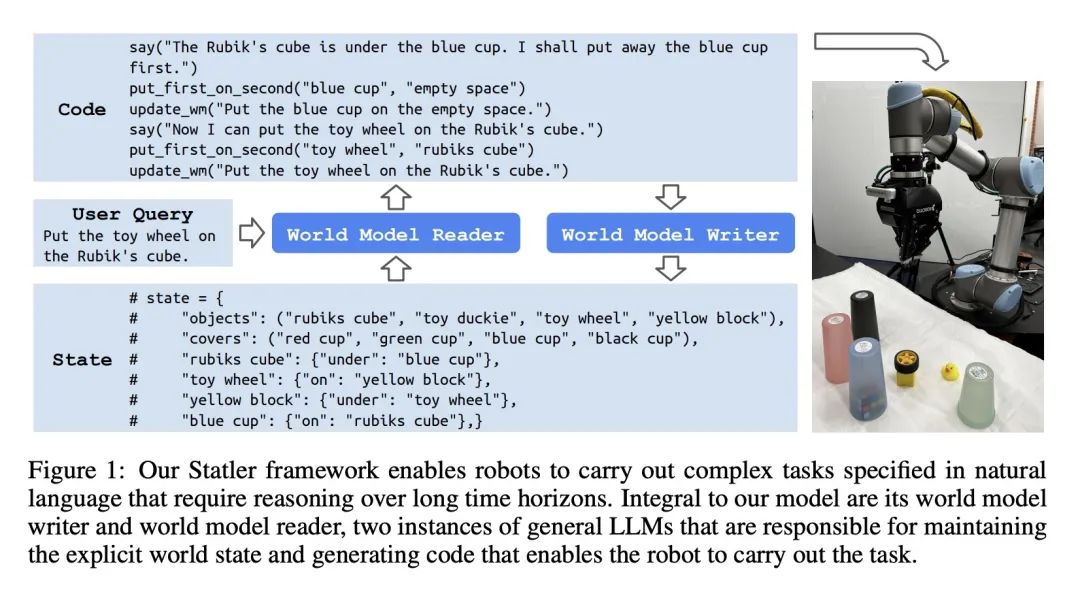
动机:大型语言模型(LLM)为机器人执行复杂的推理任务提供了有希望的工具。然而,现代LLM的有限上下文窗口使得在长时间范围内进行推理变得困难。本文提出Statler,一个使LLM具有显式世界状态表示形式的“记忆”,并随时间进行维护的框架。 -
方法:Statler的关键在于其使用了两个实例的通用LLM——世界模型读取器和世界模型写入器——它们与世界状态进行接口交互并维护世界状态。通过提供对这个世界状态“记忆”的访问,Statler提高了现有LLM在没有上下文长度限制的情况下进行长时间推理的能力。 -
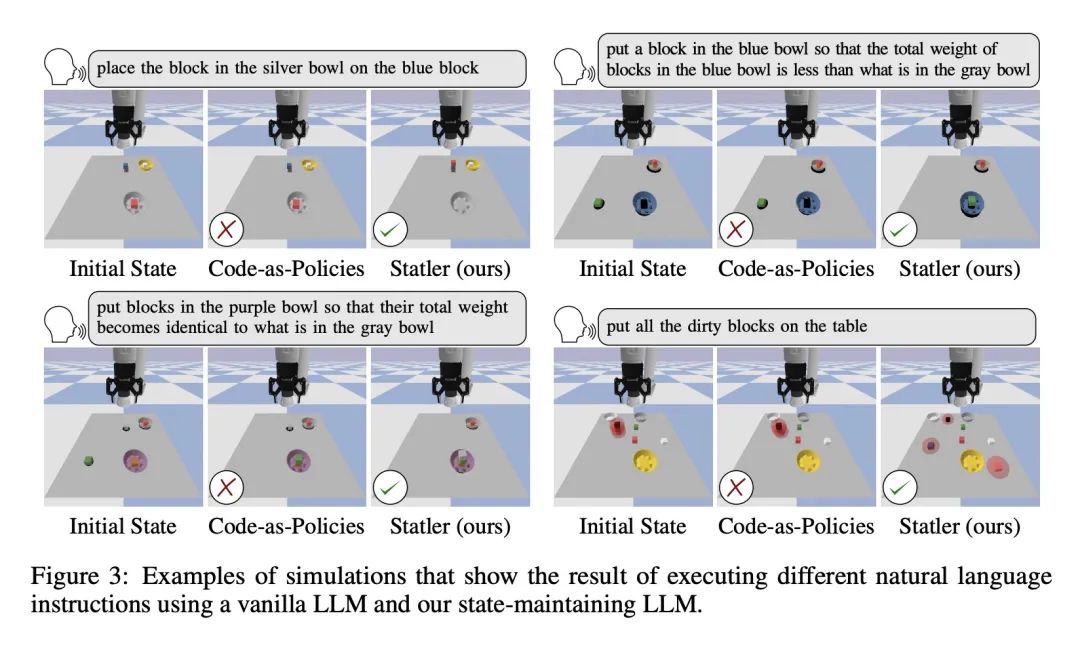
优势:在三个模拟的桌面操纵领域和一个真实的机器人领域评估了所提出方法的有效性,并显示出它提高了基于LLM的机器人推理的最新水平。
Statler是一个新框架,通过使用两个实例的大型语言模型——世界模型读取器和世界模型写入器——来维护和接口交互世界状态,从而提高了机器人在没有上下文长度限制的情况下进行长时间推理的能力
https://statler-lm.github.io/
https://arxiv.org/abs/2306.17840
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...




这是一个专注于人工智能产品的导航站。
